
Robotica unplugged/MouseBot

Per vedere il proprio topo (okay, okay: mouse) prendere vita è sufficiente svuotarlo di tutto (tranne dieci centimetri di filo, che diventeranno una bellissima coda) e seguire le istruzioni riportate in questo semplice schema di montaggio:

Idea di base[modifica]
Il mouse prende vita grazie a due motori elettrici, che verranno posizionati a l'uno dall'altro, come mostrato in figura.


Attenzione I due motori elettrici verranno alimentati da una batteria soltanto. Come visibile dallo schema elettrico, le due batterie sono connesse in serie e il terminale centrale e connesso a entrambi i motori. Così facendo, una batteria viene utilizzata per la marcia in avanti, l'altra per la retromarcia (quindi molto meno). Una buona idea è invertirle, di tanto in tanto, un po' come si fa con le ruote anteriori e posteriori degli autoveicoli. I baffi – invece – sono dei comuni SPDT (switch single-pole double-throw) con un terminale comune (connesso a un capo del motore), mentre gli altri due terminali sono connessi alle batterie:
- quello normalmente chiuso è connesso alla batteria con segno + (per far avanzare il mouse);
- quello normalmente aperto (chiuso solo quando il baffo urta un ostacolo) connesso alla batteria con segno - (per farlo retrocedere, o curvare).
Così facendo, il MouseBot avanzerà sempre, tranne quando urterà un ostacolo:
- se lo urta a sinistra il motore a sinistra verrà connesso a una tensione negativa, pertanto andrà in retromarcia, provocando una rotazione in senso orario;
- viceversa, se è il baffo destro a urtare qualcosa, il motore destro verrà alimentato con una tensione negativa e, la sua retromarcia, provocherà una rotazione in senso antiorario;
- infine, in caso di urto frontale entrambi i motori verranno alimentati con una tensione negativa e il MouseBot andrà in retromarcia.
In questo esempio si è utilizzata soltanto l'elettronica. Questo significa che le retromarce dureranno pochi istanti. Non bisogna stupirsi se il mouse si incastrerà in qualche angolo.
In ogni caso, la guida autonoma consente al MouseBot di divincolarsi da qualsiasi ostacolo con due eccezioni:
- divani o spazi troppo bassi;
- e, naturalmente, scale...
Fasi di montaggio[modifica]
-
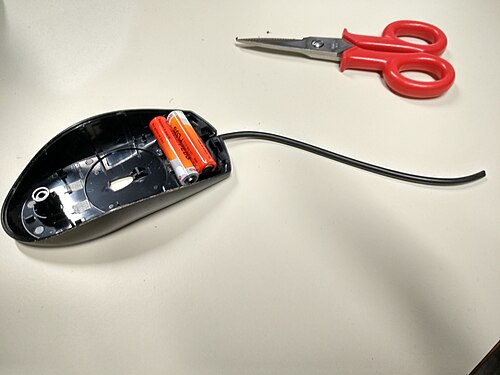 Fase iniziale
Fase iniziale -
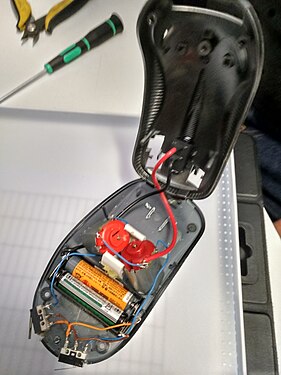 Visione interna
Visione interna -
 Il mouse prende vita
Il mouse prende vita
.jpg)
.jpg)

Come spiegato, il mouse va svuotato di tutto. Si lascia spazio per i due motori in modo che tra essi formino un angolo di . Naturalmente l'allineamento non sarà perfetto, pertanto è naturale che il topolino viaggi verso destra o verso sinistra, non in linea retta.
Naturalmente, il mouse, più grande è, meglio è. Se poi qualcuno vuole esagerare, nessuno vieta di costruire un gatto, con un apposito supporto.
Problemi energetici[modifica]
Il mouse e quello che vi è contenuto è estremamente leggero, pertanto non sarà un problema alimentare i due motori con una singola batteria. Certo, si sarebbe potuto risolvere la questione con un ponte ad H, ma si è pensato di procedere così per utilizzare un numero fortemente ridotto di componenti.
Come anticipato, una possibile soluzione a questo problema è invertire la posizione delle due batterie dopo l'utilizzo, dal momento che la batteria connessa ai motori viene utilizzata per la marcia, mentre l'altra solo per le manovre (svolta a sinistra, svolta a destra e retromarcia).
Crediti[modifica]
- L'idea di partenza di questo progetto è di Tony--K. Il progetto è stato rielaborato: sono state corrette alcune imprecisioni nello schema elettrico e ne è stata migliorata la sua leggibilità. Tutti i disegni e prodotti realizzati sono originali.