Wikibooks, manuali e libri di testo liberi.
- Tipi di controllori analogici
- elettronici
- pneumatici
- meccanici
- idraulici
- misti
- Svantaggi rispetto ai controllori digitali
- alto costo per modifiche progettuali
- degradazione dei componenti nel tempo
- incertezza nel valore dei parametri, anche in funzione delle condizioni operative (correnti, pressioni, temperature...)
- condizioni non ideali
- disturbi
Regolatori PID
| Compensatore di tipo P |
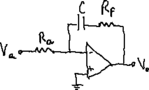
Compensatore di tipo I (integratore) |
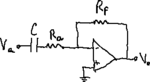
Compensatore di tipo D (derivatore)
|

|

|
|

|

|

|
| Compensatore di tipo PI
|
Compensatore di tipo PD
|
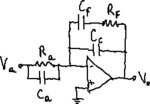
Compensatore di tipo PID
|
|

|
|

|

|

|
Reti di compensazione
| Rete anticipatrice
|
Rete attenuatrice
|
Rete integro-derivativa
|

|

|

|

|

|









